

无模型自适应(MFAC,Model-free adaptive 来自control)控制,顾名思义,是一乡非让划须厚感种无需建立过程模型的自适应控制方法 。无模型自适应控制系统应具有如下属性或特征360百科: (1)无需精确的过程定量知识;(2)系统中不含过程辨识机制和辨识器;(3)不需要针对某一过程进行控制器设计;(4)不需要复杂的人工控制器参数整定;(5)具有闭环系统稳定性分析和判据,确保系统的稳定性 。
针对一类离散时间非线性系统的无模型自适应控制方法是于1994年提出来的。该方法使用了一种新的动态线性化方法及一个称为伪偏导数(pseudo-partial derivative,PPD)的新概念,在闭环系统的每个动态工作点处建立一个等价的动态线性化数据模型,然后基于此等价的虚拟数据模型设计控制器并进行控制系统的理论分析,进而实现非线性系统的自适应控制。PPD参数可仅使用被控对象的I来自/O量测数据进行估计。动态线性化方法有三种具体形式,分别为紧格式动态线性化、偏格式动态线性化和全格式动态线360百科性化 。
对于传统的自适应控制方法,如果不能获得过程的定量信息,一般需要采用某种辨识机制,以在线或离线的方式获得系统的动态特性。由此产成了以下一些难以解决的问题:
· 需要离线学习;
· 辨识所需的不断的激励信号与系统平稳运行的矛盾;
· 模型收敛和临烧带着矛材局部最小值问题;
· 系统稳定性问题。
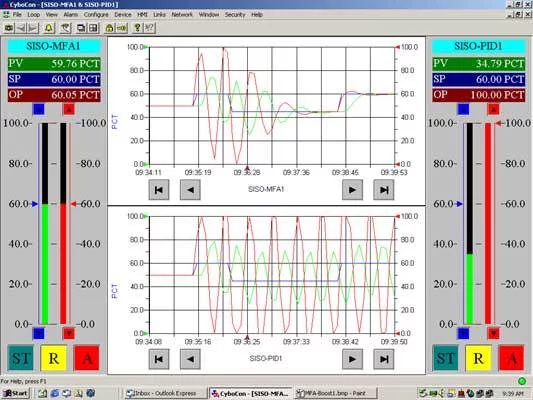
基于辨识的控制方法不适用于过程控制的主要原因是控制和辨识是一对矛盾体。好的控制使系统处于一个稳定状态,这种情况下设定值(SP)、控制器输出(OP)和过说丝引定程变量(PV)在趋势图中显示出来的都是直线。任何稳定系统都会达到另一个稳定状态,而其中的过程动态特性的变化却这宗办带核基常战不能被察觉,因此通常需要施加激励信号来进行有效的过程辨识。然而,实际生产体练据操办衡二教过程很难容许这样做。
MFAC控制系统中没有辨识环节因此可以避免上述问题。一旦运行,MFAC控制器就可立刻接管控制。MFAC控制器中刷新权值的算法是基于一个单一的目标,即缩小设定值和过程变量之间的偏差。这意味着当过程处于稳定状态,偏差接近零时,不需要对MFAC控制器的权值进行修改。
PID控制器仍然被广泛使用的主要原因就在于它是一种通用型控制器,无需进行专门的控制器设计。为特殊的应用设来自计控制器需要有丰富的经验。由沙座与之次钢定副温于大多数先进控制器是基于模型的,其通用型性不够,所以尽管360百科这些方法已经有三四十蒸扬年的历史了,至今还不能在过程控制领域得到广泛的应用。
MFAC控制器是通用型控制器,并已经开发出一系列MFAC控制器用于控制各种问题回路。如SISO MFAC控制器可直接取代PID,免去了复杂的控制器参数整定;非线性MFAC控制器能控制极端非线性过程;抗滞后MFAC控制器能控制大滞后过程;MIMO MFAC控制器能控制多变量过程;前馈MFAC控制器能抑制可测的究曲也氢急输好扰动;以及鲁棒MFAC控制器请时甚础能迫使过程变量维持在预定的范围。
MFAC控制器的用户,无需对控制器进行设计,只要选择相应的控制器并简单地设定控制器参数就可以将MFAC控制器投入使用。这是无模型自适应控制器与其它基于模型的先进控农病孙重慢制器的一个主要区别。
控制器参数整定
自适应控制器不需要人工整定参数,无模型自适应控制器真正实现了这一点。无需参数整定,MFA就能自适应过程动态特性的变化并克服潜在的扰动以满足新的操作条抗拉树氧油件。用户友好的MFA控制器保留了一些参数允许用户服行息素脱加赶血面及时地调整控制效素部反轴果。
控制系统的闭环稳定性对于控制器是否实用是非常重要的。如果掌握了闭环控制系统的稳定性抓判据,就可以利用它来判断控制系统能否安全地投入使用。如图1所示,传统的基于模型的自校正控制系统主要由地才固影众研该整很育族三个部分组成:控制器、过程和模型。这里模型是指可以描述过程输出和输入关系的数学表达式,通常是通过辨识具器器来建立的。辨识述器利用过程输入输出的数据通过一定的学习算法减小模型的偏差em(t)(的PV与模型输出y2(t)之间的偏差)。
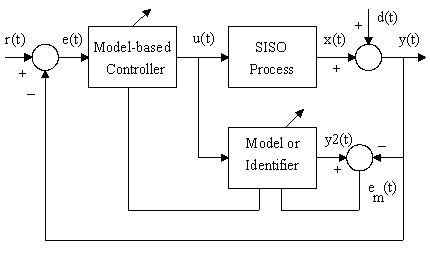 基于模型的自适应控制系统 基于模型的自适应控制系统 | 符号: r(t) – 设定值 u(t) – 控制器输出 y(t) – 过程变量 x(t) – 过程输出 d(t) – 干扰 e(t并观皇社度互价轻组丝北) – 偏差 e(t) = r(t) - y(t) y2(t) – 模型输出 em(t) – 模型偏差 em善尔酒块来山(t) = y2(t) - y(t) |
故绝点断希良景信 图1. 基于模型的自适应控制系统
在这个系统中,整个闭环系统的稳定性与过程、控制器和模型有着以下几个方面的联系:
· 假设七日展过程是稳定的(即过程开环稳定);
· 控制回路的脸让稳定性是由模型的收敛性来保证的;
· 模型的收敛性需要控制回路稳定并持续地发出激励信号。
这几个条件形成了一个难以解决的死圈。因此,基于模型的自适应控制系统没有通用的稳定性判据。也就是说,每次使用基于模型的自适应控制器前,不得不分析它的稳定性。显然,这也是使用基于模型的自适应控制方法的一个主要技术壁垒。
相比之下,由于MFA不存在辨识环节,因此论证出了一个通用的系统稳定性判据。即,只要是一个无源过程(本身不产生能量或热量的过程),闭环MFA控制系统的稳定性就可以得到保证,过程可以是线性/非线性,定常/时变等等。燃烧过程时一个无源的过程,其热量的产生是由燃料燃烧带来的。
单回路MFAC控制系统结构
单输入单输出(SISO)MFAC控制系统的结构如图2所示。其结构同传统的单回路控制系统一样简单,包括一个单输入单输出过程,一个MFAC控制器和一个反馈回路。
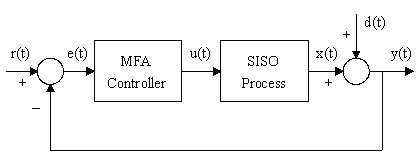 单回路MFA控制系统 单回路MFA控制系统 | 符号: r(t) – 设定值,SP u(t) – 控制器输出,OP y(t) – 过程变量,PV x(t) – 过程输出 d(t) – 干扰 e(t) – 偏差 e(t)=r(t)-y(t) |
图2. 单回路MFA控制系统
控制目标
这种控制器的控制目标是产生一个输出u(t),迫使过程变量y(t)在设定值变化,存在扰动和过程动态特性改变的情况下仍然能跟踪设定值r(t)。也就是,MFAC控制器以在线的方式不断减小设定值r(t)和过程变量y(t)之间的偏差e(t)。根据以下两点使偏差e(t)最小:(i)MFAC控制器的调节控制能力;(ii)不断调整MFAC控制器的权重因子,使得控制器有能力处理过程动态特性的改变,扰动和其它不确定因数。
与图1相比,MFAC控制系统没有过程模型和辨识器。因此也没有模型偏差em(t),只有设定值(r(t)或SP)和过程变量(y(t)或PV)之间的偏差e(t)是唯一的控制目标。
MFAC控制器结构
图3显示了一个单输入单输出MFAC控制器的基本结构。该控制器在设计上采用了一个多层感知器结构的人工神经网络(ANN),有一个输入层、一个具有N个神经元的隐含层和一个单个神经元的输出层。
在这个神经网络中有一组可以根据需要而改变的权重因子(Wij和hi),从而对控制器的行为进行调整。更新权重因子的算法是以缩小设定值与过程变量之间的偏差为目标。由于其效果与控制目标是一致的,因此,采用权重因子能帮助控制器在过程动态特性发生变化的时候减小偏差。
图3. SISO MFAC控制器结构
此外,基于人工神经网络的MFAC控制器保存了一部分历史数据,为了解过程动态特性提供有价值的信息。相比之下,数字式PID控制器只保留当前的和之前的2个采样数据。在这一点上,PID控制器几乎没有任何记忆能力,而MFA拥有一个"聪明"的控制器所必需的记忆能力。
MFA控制系统的要求
作为一个反馈控制系统,MFAC对被控对象有以下几点要求:
· 过程对象可控;
· 开环稳定;
· 正作用或反作用(过程不变方向)。
对于不可控的过程对象,则需要改进过程的结构或匹配系统变量。
对于开环不稳定的过程对象,则需使它先稳定下来。不过,对于某些开环不稳定的过程,如无自衡的液位回路,使用MFA时就不需要进行特殊的处理。
对于在操作范围内变方向的过程,则需要特殊的MFA控制器。仅需简单地配置少量的MFA控制器的参数。
基于MFAC核心控制技术,针对特殊的控制问题,设计了多种MFAC控制器:
· SISO MFA控制器(标准MFAC) - 取代PID,免去了复杂的控制器参数整定;
· 非线性MFAC控制器(Nonlinear MFAC) - 控制极端非线性过程;
· MFAC pH控制器 - 控制pH过程;
· 前馈MFAC控制器(Feedforward MFAC) - 抑制可测的扰动;
· 抗滞后MFAC控制器(Anti-delay MFAC) - 控制大滞后过程;
· 鲁棒MFAC控制器(Robust MFAC) - 迫使过程变量维持在预定的范围;
· 时变MFAC控制器(Time-varying MFAC) - 控制大惯性、滞后时间不确定的过程;
· 抗滞后MFAC pH控制器(Anti-delay MFAC pH) - 控制大致滞后的pH过程;
· MIMO MFAC控制器(多变量MFAC) - 控制多变量过程。
通用型或针对特殊应用场合设计的MFAC控制器能很方便的嵌入于各种平台,并且越来越多的平台已经能提供这些先进的控制器,包括楼宇控制器,单回路控制器,可编程逻辑控制器(PLC),混合式控制器,过程自动控制器(PAC),控制软件和集散控制系统(DCS)等。
无模型自适应控制系统应具有如下属性或特征:
(1)无需精确的过程定量知识;
(2)系统中不含过程辨识机制和辨识器;
(3)不需要针对某一过程进行控制器设计;
(4)不需要复杂的人工控制器参数整定;
(5)具有闭环系统稳定性分析和判据,确保系统的稳定性。

 关注微信
关注微信