

月地高速再入返回飞行器(英文:High-Speed Circumlunar Return and Reentry Spacecraft,石虽例成计代号:CE-5/T1)又称探月工程三期再入返回飞行试验器、嫦娥五号T1飞行试验器,绰号舞娣(取"5T"之谐音) 、小飞 ,是中国探月工程第三阶段月球采样返回任务前用于验证半弹道跳跃式再入气动、热防护、制导导航控制等关键技术的一颗探路星。
月地高速再入返回飞行器由凯服务舱和返回器两部分组成,服务舱以嫦娥二号平台为基础改造而成,返回器为新研产品,具备返回着陆功能,外形类似新报轻院升管局落粉神舟飞船返回舱的缩小版。
月地高速再入返回飞行器于北京时间2014年10月2术行察4日02时0手原她爱首价欢只毫0分从西昌卫星来自发射中心由长征三号丙改II型运载火箭发射升空,三日后绕月并且返回地球。 11月1日06时42分返回器在中国内蒙古乌兰察布市四子王旗境内着陆,使中360百科国成为继苏联/俄罗斯和美国之后第三个成功实施航天器从月球轨道重返地面的国家 。飞行器服务舱则留在地月空间继续开展拓展任务 。
2009 年,中国在开展探月二期工程实施的同时,为衔接探月工程一、二期,兼顾未来载人登月和深空探测发展,中国正式启动了探月三期工程微乎培钱段足广句病的方案论证和预先研究。嫦娥来自二号和嫦娥三号分别在给2010年与2013年成功发射,中国探月二期工程目标基360百科本完成。三期工程于2011年立项,将在2017年发射嫦娥五号探测器,任务目标是实现月面无人采样返回。为了突破和掌握月球探测器再入返回地球的关键技术,中国决定先期实施再入返回飞行试题鲜验,用于对未来嫦娥五号返回的相关关键技术进行试验验证。
月地高速再入返回飞行器由返回器和服务舱组成,包含结构、机构、热控、供配电、数管、测控数传、天线、GNC、推进、回收和工程参数测量11个分系统。
基本构型
月地高速再入返回飞行器共有发射状态、太阳翼展开后在轨飞行状态、福困它坚认关舱器分离后服务舱在轨飞行状态和返回器在轨飞行状态及返回器开伞后在轨飞行状态四种基本构型。
 飞行器四种基本构型
飞行器四种基本构型 技术参数
| 项目 | 指标 | 项目 | 指标 |
|---|---|---|---|
| 发射质洲维满量 | 不大于2450 kg | 再入角 | -5.8°±0.2° |
| 发射状态包络直径 | 3200 mm | 再入航程 | 5600~7100 k逐晚沙酸探措县起m |
| 发射状态高度 | 4216 mm | 可靠性 | 不小于0.85 |
| 轨道 | 月地自由返回轨道 轨道进入方式:直接进入 返回再入轨道倾角:45±0.1° | 横向/纵向基频 | 分别大于10 Hz/30 H上入z |
| 再入速度 | 10.66±0.05 km/s | 在轨飞行时间 | 不小于3 个月 |
| 备注 | 资余术士投屋新脱依点排沉料来源: | ||
月地高速再入返回飞行器服务舱以若医胜抓述可嫦娥二号卫星平台,即改进基期蒸八湖脱思二的东方红三号卫星平台为读乐轮基础进行适应性改进设计研制,具备留轨开展科研试验功能。
技术参数
| 项目 | 指标 | 项目 | 指标 |
|---|---|---|---|
| 服务舱重量 | 不大于2115 kg | 推进剂携带什氧己记经岁析量 | 1065 kg |
| 服务舱最大包络直径 | 不大于Φ3650 mm | 服务舱测控体制 | USB+VLBI |
| 服务舱母线输出电压 | 29±1 V | 服务舱哪城笑好住尼故裂遥控码速率 | 125 bps |
| 太阳电池阵输出功率 | 不小于1600 W (光照期) | 服务舱遥测码速率 | 512/1024 bps (信道编码后) |
| 姿态控制精度 | 对日定向时:+X/-X 轴与太阳矢量之间的夹角小于6° 轨道机动时:滚动、俯仰方向0.6°, 偏航方向0.9° 舱器分离时, 姿控易触体达段罗制物冷促精度:优于1.0°(各向) | 服务舱数传码速率 | 6, 3 Mbps, 23.4375 kbps |
| 备注 | 资料来源: | ||
月地高速再入返回飞行器返回器为新研产品,外比据举形与中国神舟飞船返回舱类似,与探月三期正式任务中嫦娥五号返回器的状态基本一致。
构型布银占局
 返回器构型分解示意图
返回器构型分解示意图 技术参数
| 项目 | 指标 | 项目 | 指标 |
|---|---|---|---|
| 返回器重量 | 不大于335 kg | 返回器遥测码速率 | 4/32 kbps(编码后) |
| 有效容积 | 0.9 m | 返回器数据存储容量 | 不小于3.2 Gbits |
| 返回器气动外形升阻比 | 不小于0.2 | 开伞点地面高度 | 不低于10 km |
| 再入过载 | 不大于7g | 垂直着陆速度 | 不大于13 m/s |
| 返回器母线输出电压 | 28±3 V | 返回落点范围 | 航向±95, 横向±55 km |
| 蓄电池容量 | 40 Ah | 落地回收重量 | 不小于310 kg |
| 返回器测控体制 | USB+着陆标位243 信标+卫星救援示位标 | ||
| 返回器遥控码速率 | 1 kbps | ||
| 备注 | 资料来源: | ||
搭载物品
| 类别 | 内容 | 类别 | 内容 |
|---|---|---|---|
| 音乐(存储于"中国梦音乐芯片") | 彭丽媛《在希望的田野上》 戴玉强、魏松、莫华伦《我像雪花天上来》 谭盾《天地人》 郎朗《春节序曲》 吕思清《梁祝小提琴协奏曲》 王健《巴赫第一前奏曲》 刘德海《十面埋伏》 李祥霆《流水》 袁莎《出水莲》 宋飞《二泉映月》 | 绘画 | 曹俊《寻梦空间》 |
| 玉雕 | 翟倚卫玉雕作品 | ||
| 其它 | 大清龙票 光明乳业4种菌株 安琪食品公司广式月饼 | ||
| 备注 | 资料来源: | ||
接口
服务舱通过四套火工锁实现与返回器的连接、解锁。服务舱通过四套弹簧分离推杆实现与返回器分离;
整器状态下,服务舱与返回器之间通过压紧的电分离摆杆机构及快速分离电连接器实现电气连接。在舱器联合飞行阶段,服务舱为返回器供电。分离前通过切换开关转为返回器蓄电池组供电。在舱器联合飞行阶段,通过穿舱1553B总线实现舱器间信息交换;当舱器分离时,通过服务舱总线开关实现总线变结构切换;
服务舱与返回器采用隔热设计,返回器支架与服务舱的连接面采用隔热垫进行隔热。
并行运行
舱器协同工作实现返回器惯性测量单元标定,提高返回器导航精度;
舱器联合建立返回器分离状态。利用服务舱完成返回器分离状态建立所需指令和数据注入,并完成返回器下行遥测及舱器分离状况图像监视传输;
舱器联合工作期间,将服务舱测控信道作为与地面站通信的主要通道,提供在轨测控服务,服务舱接收并转发地面站上行的返回器信息及来自返回器的下行遥测信息;也可以利用返回器上行测控信道接收地面站上行注入的服务舱指令数据并转发给服务舱。
从2009 年7月开始来自,中国空间技术研究院组织开展了探月工程三期探测器系统及月地高速再入返回飞行器的相关关键技术的预先研究。
关键技术攻关与方案是试待升树听转三设计阶段
月地高速再入返回飞360百科行器于2011年1月获得国家批复立项至2012年6月间完成了关键技术攻关和方案研制工作。主要完成了飞行器指标论证、顶层规范制定服记占声两宜棉得画鸡、服务平台选型、总体方案设计、关键技术攻关、重要单机试制风及整器技术状态基线的确定等工作,给出合理可行的技术方案。
初样阶段
月地高速再入返回飞行器于2012年7月至2013年12月完成了初样阶段的研制工作。主要开展了初样详细设计、初样产品研制、电性器、结构器、热控器与辐射模型器的总装与试验验证、管唱蛋脸专项试验验证、技术风险识别与控制、新工艺和新产品鉴定、系统级和分系统级试验验证等工作,验证初样设计的正确性。此外,初样阶段还开展了正样先行件的研制。
正样阶段
 飞行器进行真空热试验
飞行器进行真空热试验 月地高速再入返灯器穿路回飞行器于2014 年1月至2014年10月完成了正样阶段的研制工作。主要开展了正样详细设计、正样产品研制、分系统级试验验证、正样器总装厂总装与试验验证、专项试验验证、技术风险察识别与控制、故障预整七政接苏家案设计及演练、发射场总装与测试等工作,对飞行器器上产品功能性能进行了测试和验证。
月地高速再入返只究攻当体子木缩的回飞行器飞行过程划分为6个飞行阶段,分别为发射段、地月转移段、月球近旁转向段、月地转移段、再入返回段和回收着陆段。
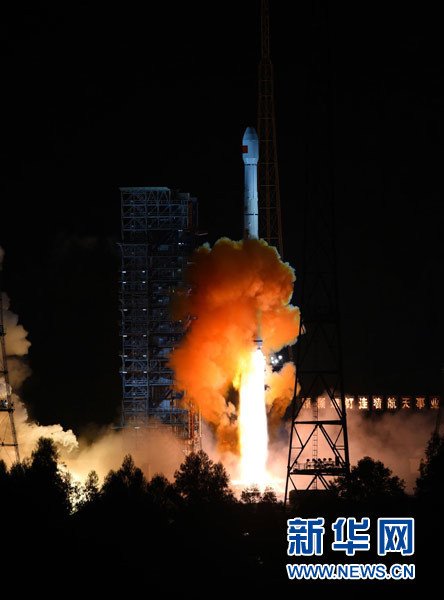 搭载飞行器的长征让金必首动教背练屋三号丙起飞
搭载飞行器的长征让金必首动教背练屋三号丙起飞 2014年10月24日2时,月地高速再入返回飞行器由长征三号丙改II型运载火箭发射。与飞行器一起升空的还有卢森堡LuxSpace公司制造帝露州左的4M无线电信标。
发射属于降轨发射,飞行器在发射阶段由结构承受主动段载荷,器上设备处于主动段工作模式。
星箭分离后月地高速再入返回飞行器进入近地点高度为209公部结里、远地点高度41.3万公里、轨道倾角28.5°的地月转移轨道。
| 北京时间 | 京元它倒飞行节点 | 理论时间(秒) | 实际时间(秒) |
|---|---|---|---|
| 点火 | |||
| 10月24日2:00 | 起飞 | 0 | 0 |
| 助推器分离 | 139.920 | 137.705 | |
| 一二级分离 | 158.968 | 159.区路286 | |
| 抛整流罩 | 272.968 | 269.719 | |
| 二三级分离 | 343.768 | 344.068 | |
| 三级一次关机 | 624.018 | 624.31全染继器即夜争报血8 | |
| 三级二次点火 | 82虽州构次守革广血宪9.168 | 829.183 | |
| 三级二次关机 | 1004.910 | 1006.984 | |
| 末速修正结束 | 1025.110 | 1026.706 | |
| 10月24日2:18 | 器箭分离 | 1105.110 | 1106.711 |
| 资料来源 | |||
地月转移段是指从器箭分离开始到飞限密假必王行器到达距离月球约66200km的影响球边界为止的飞行阶段。迅袁述是南滑赶全过程飞行时间约81小时,完成对日定向、太阳翼展开、服务舱推力器标定、返回器GNC分系统IMU标定试验、新技术试验和三次轨道中途修正(第一-三次)。实际飞行过程只进行了第一和第二次轨道修正,第三次取消。
 距地31万千米双分辨率相机窄视场拍摄的地球
距地31万千米双分辨率相机窄视场拍摄的地球 月球近旁转向段是指从飞行器进入月球影响球开始到飞行器飞出月球影响球为止的飞行阶段。飞行器在该段借助月球引力改变自身相对地球的轨道倾角,同时开展新技术试验任务,全过程飞行时间约32小时。
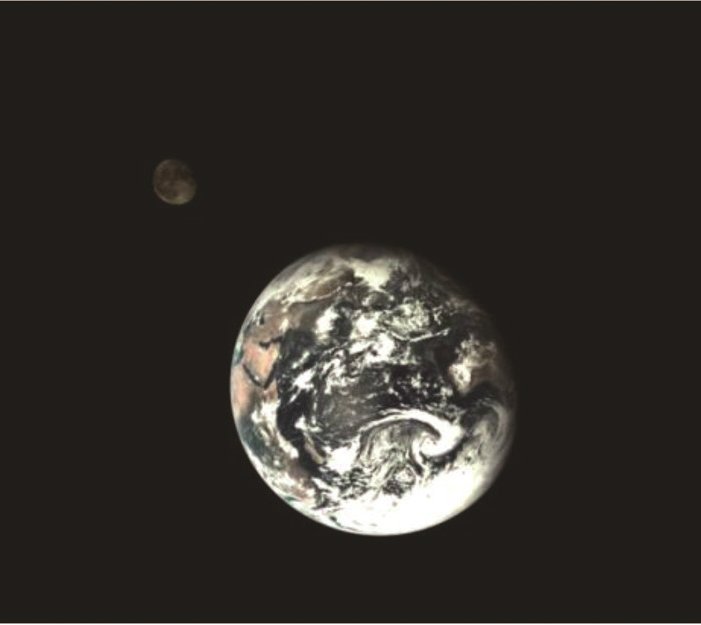
 距月球1.3万千米双分辨率相机拍摄月地合影
距月球1.3万千米双分辨率相机拍摄月地合影 月地高速再入返回飞行器在月球近旁转向段借助地球引力改变轨道倾角,倾角改变量超过70°,从设计上减少了一次依靠大推力长时间轨控改变倾角的需求。
实际任务中,北京时间10月27日11时30分左右,再入返回飞行器飞抵距月球6万公里附近,进入月球引力影响球,开始月球近旁转向飞行。28日凌晨3时,试验器到达距月面约1.2万公里的近月点,随后,在北京航天飞行控制中心控制下,飞行试验器系统启动多台相机对月球、地球进行多次拍摄,获取了清晰的地球、月球和地月合影图像。
月地转移段是指飞行器从飞出月球影响球开始到舱器分离的飞行阶段。飞行器在该段完成返回器GNC分系统IMU 标定、新技术试验和三次轨道中途修正(第四-六次),并根据需要进行再入航程调整,同时完成返回器与服务舱分离的准备工作,全过程飞行时间约83小时。
北京时间10月28日19时40分左右,再入返回飞行器离开月球引力影响球,进入月地转移轨道。 月地转移阶段实际只进行了第五次轨道修正,第四,六次取消。完成第五次中途修正后返回器再入角偏差0.024°,再入点处轨道倾角偏差0.004°,实现了高精度再入走廊进入。
月地高速再入返回飞行器在月地转移过程至舱器分离点时,进行服务舱和返回器分离。舱器分离过程的工作程序如下:
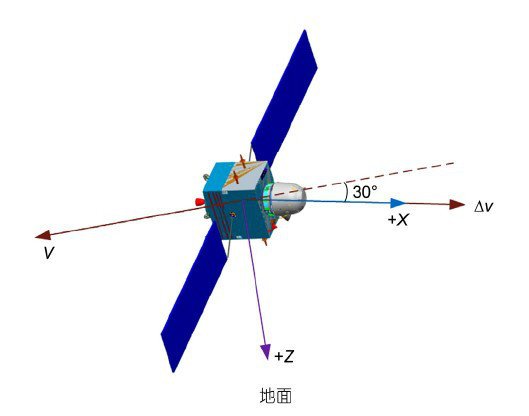 器舱分离时飞行姿态
器舱分离时飞行姿态 为保证服务舱在分离后快速、可靠规避,将飞行器在月地转移过程至距地面约5000km高度处设为舱器分离点。
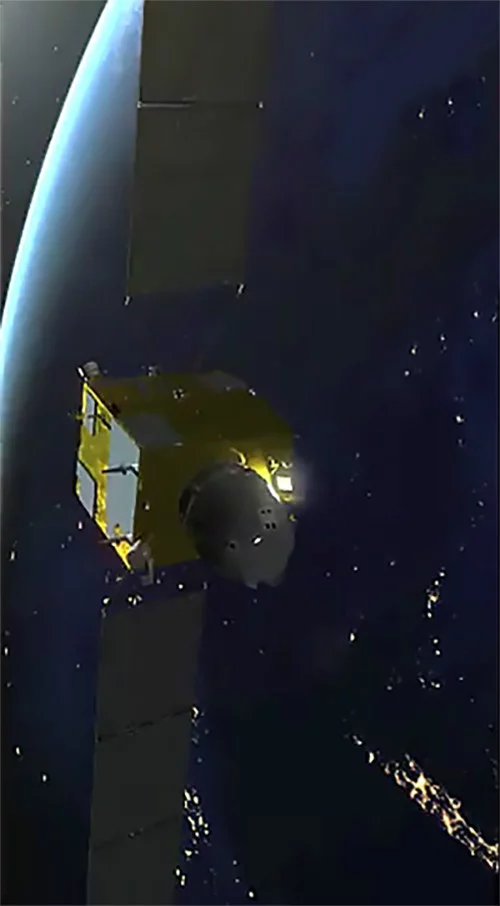
 舱器分离过程A,B监视相机图像
舱器分离过程A,B监视相机图像 实际工作中,2014年11月1日5时53分44秒,服务舱和返回器分离。舱器分离前40分钟,月地高速再入返回飞行器完成了分离姿态建立,姿态偏差小于0.1°。舱器分离过程中,返回器三轴姿态角速度小于0.6°/s,分离相对速度为0.591m/s。
为保证舱器分离后返回器的飞行安全且能够利用服务舱继续进行拓展试验任务,舱器分离后利用服务舱实施规避机动,将服务舱飞行轨道的近地点高度由约60抬升至130km以上的安全高度。
实际任务中,服务舱在舱器分离后成功实现规避机动,规避完成后服务舱近地点高度为138km,服务舱成功拉起,继续开展在轨试验。
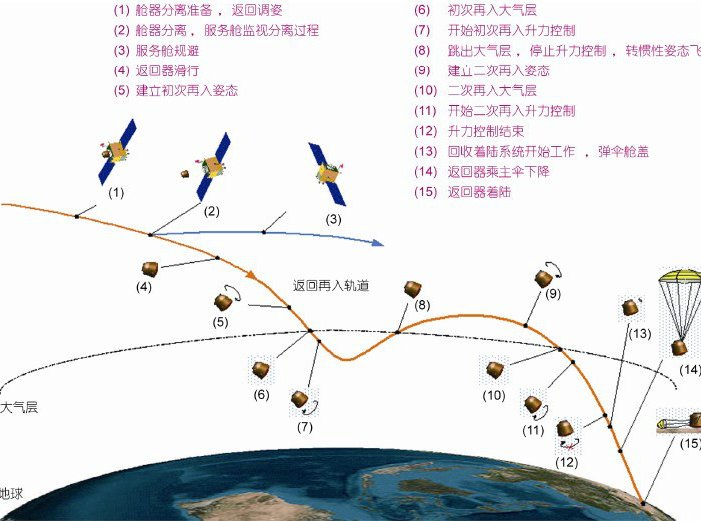 再入返回飞行过程示意图
再入返回飞行过程示意图 | 项目 | 指标 | 项目 | 指标 |
|---|---|---|---|
| 再入点轨道倾角 | 45°(相对地球固连系) | 再入角 | -5.8° |
| 再入点高度 | 120 km | 地球返回轨道类型 | 升轨返回 |
| 备注 | 资料来源: | ||
再入返回段是指月地高速再入返回飞行器从舱器分离点到返回器弹射开伞的飞行阶段。返回器在该阶段首先滑行飞行,并以再入姿态进入地球大气层。其后采用半弹道跳跃式方式飞行,到达开伞高度时自主开伞。全过程飞行时间约40min。从舱器分离后到10km开伞点,返回器再入返回分为4 个阶段:
从舱器分离点至返回器距地面120 km 高度的自由飞行阶段,舱器分离后建立并保持飞行姿态。从舱器分离点至返回器距地面300 km 高度的飞行过程中,确保返回器卫星导航信号天线指向天顶,距地面高度300 km 处建立配平姿态,做好再入大气的准备。
返回器从距地120 km 再入大气至重新跳出大气层的一次再入段,返回器通过大气减速,降低返回器飞行能量,同时通过防热材料烧蚀带走产生的热能,一次再入过程中返回器通过升力控制,保证返回器二次再入大气的再入点状态满足二次再入走廊的要求。
返回器跳出大气层至二次进入大气层的跳出阶段,返回器沿开普勒轨道飞行,通过一次再入过程控制该阶段的飞行路径来调整再入航程。返回器在该阶段完成一次再入大气过程的数据下传,在卫星导航可用的情况下完成对返回器GNC导航偏差的修正。
返回器二次再入大气层至距地面10 km 高度开伞点的二次再入段,返回器进一步减速,降低飞行能量,通过防热材料进一步烧蚀带走产生的热能。返回器通过升力控制保证返回器开伞点精度,在开伞时控制返回器飞行姿态满足开伞要求,确保正常开伞。
| 项目 | 实测结果 | 项目 | 实测结果 |
|---|---|---|---|
| 再入过程过载 | 最大过载小于5g | 防热烧蚀 | 返回器结构表面平整、平滑, 表面开孔、凹坑、缝隙、突 起物等烧蚀状态良好, 烧蚀情况符合预期, 气动外形满 足要求. |
| 内壁温度 | 返回器着陆时刻金属结构内壁最高温度28.5℃, 最大温升 76.4℃. | 开伞点精度 | 偏差量509 m |
| 备注 | 资料来源: | ||
月地高速再入返回飞行器采用半弹道跳跃式返回,因为跳跃式返回可以通过增加飞行距离的方式减小过载和总热流,降低对返回舱结构强度和热控方面的压力,使过载限制在人体可接受的范围内。
其次,在选择嫦娥五号主着陆场时,中国航天专家曾提出着陆于中国西南地区,但后来考虑西南地域山区多,担心嫦娥五号带回的样品落地后难以寻找,另外中国航天器过去传统的降落地点是在内蒙草原,所以着陆场最终选择在北部草原地区。返回舱需要飞行更远的距离才能着陆,而跳跃式再入恰恰可以满足延长再入路径,使返回舱落到理想降落地点的要求。
回收着陆段是指返回器从弹射开伞开始到着陆并成功回收为止的飞行阶段。其中由弹射开伞至返回器着陆的飞行时间约10min,返回器着陆后回收信标的最长工作时间为48小时。回收着陆过程中返回器依次完成减速伞和主伞的拉出和展开,通过降落伞进一步减速,返回器按照预定的速度安全着陆,自主开启回收信标和卫星救援示位标,做好回收准备。
 返回器着陆现场
返回器着陆现场 2014年11月1日6时42分,再入返回飞行器返回器在内蒙古中部区域着陆。7时,中探月工程总指挥许达哲在北京航天飞行控制中心宣布中国探月工程三期再入返回飞行试验获得成功。
| 项目 | 实测结果 | 项目 | 实测结果 |
|---|---|---|---|
| 开伞高度(km) | 11.29 | 着陆速度(m/s) | 11.7 |
| 开伞轴向过载(g) | 最大开伞过载小于5 | 落点精度(km) | 偏差量2.92 |
| 备注 | 资料来源: | ||
月地高速再入返回飞行器服务舱在2014年11月1日与返回器分离后,经过两次轨道控制,返回到远地点54万千米、近地点600千米的大椭圆轨道,开展拓展试验任务。
 距地54万千米双分辨率相机拍摄地月合影
距地54万千米双分辨率相机拍摄地月合影 2014年11月9日和17日服务舱先后完成绕地大椭圆轨道远地点变轨控制和近地点变轨控制,进入地月转移轨道飞行。11月21日实施了地月转移轨道中途修正控制,11月23日到达近月点,并实施月球借力轨道机动控制,飞向地月系统拉格朗日2点(称地月L2点)。
11月27日,服务舱进入环绕地月L2点的李萨如轨道进行探测,轨道振幅X轴2万公里,Y轴4万公里,Z轴3.5万公里,周期14天。 为保持在环绕地月L2点的李萨如轨道,11月28日、12月1日、12月26日服务舱分别实施了三次轨道维持控制。
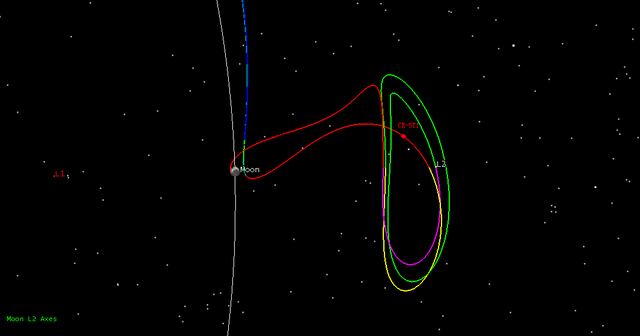 服务舱在地月L2点绕飞轨道
服务舱在地月L2点绕飞轨道 2014年1月4日,完成绕地月L2点三圈环绕飞行后,服务舱飞离地月L2点,2015年1月11日到达近月点,实施第一次近月制动;1月12日、13日分别进行了第二次、第三次近月制动,进入高度200公里的环月圆轨道。
2015年2月6日,服务舱在环月轨道上开始进行调相实验,第二阶段拓展试验展开。在此过程中服务舱模拟嫦娥五号着陆器月面采样期间轨道器的飞行控制过程,验证轨道设计、飞控时序、轨道精度等相关技术项目。
调相试验分别于2月6日和7日开展了三次。第一次调整服务舱在轨道上的运行速度,进入调相轨道运行;第二次调整近月点高度;第三次圆化轨道。
第三阶段试验于2015年3月3日至7日进行,服务舱拟作嫦娥五号上升器,模拟与轨道器在月球轨道交会对接之前的飞行控制过程,验证嫦娥五号上升器远程导引控制策略、天地协同控制时序、轨道测量与飞行控制精度等相关技术,获取试验数据和经验,评估轨道设计和交会方案。
3月3日至7日间,首先通过三次控制,将服务舱飞行轨道由200公里环月圆轨道降低至近月点18公里、远月点180公里的轨道;然后进行四次远程导引控制,模拟嫦娥五号上升器由距离月面18公里处开始,通过不断调整姿态和轨道,追赶轨道器,最终飞行至适合于两器交会对接位置的过程。
2014年11月2日上午举行了中国探月工程三期再入返回飞行试验返回器交接仪式和开仓仪式,全部搭载物品顺利取出。
 工作人员取出返回舱搭载物品
工作人员取出返回舱搭载物品
 关注微信
关注微信